This physics problem tests your understanding of fundamental physical laws and their applications. The step-by-step solution below breaks down the problem using relevant equations and physical reasoning.
ScanSolve AI Answer
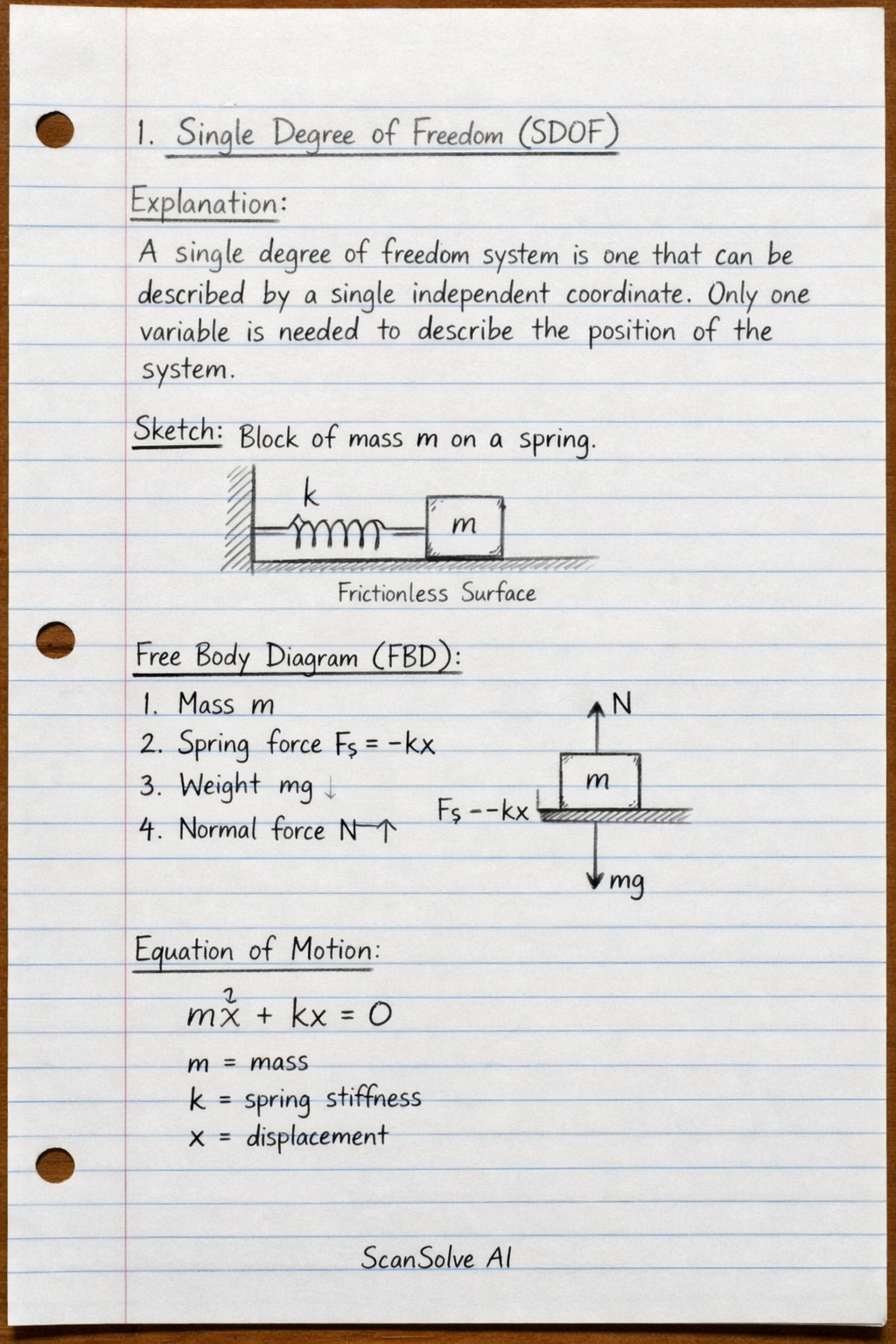
Here are the explanations for the terms used in mechanical vibration: 1. Single Degree of Freedom (SDOF) Explanation: A single degree of freedom system is one whose motion can be completely described by a single independent coordinate. This means only one variable is needed to specify the position of all parts of the system at any given time. Sketch: Imagine a block of mass m attached to one end of a spring with stiffness k, with the other end of the spring fixed to a rigid wall. The block rests on a frictionless horizontal surface. The only motion allowed is horizontal translation. Free Body Diagram (FBD): A block of mass m. A spring force F_s = -kx acting on the block, opposing displacement x. Gravitational force mg acting downwards. Normal force N acting upwards, balancing gravity. Equation of Motion (undamped): mx + kx = 0 where m is mass, k is spring stiffness, and x is displacement. 2. Double Degree of Freedom (DDOF) Explanation: A double degree of freedom system requires two independent coordinates to completely describe its motion. This typically involves two masses or two distinct modes of motion that are coupled. Sketch: Imagine two blocks, m_1 and m_2, connected in series by springs k_1 and k_2. Block m_1 is attached to a fixed wall by spring k_1, and block m_2 is attached to m_1 by spring k_2. Both blocks rest on a frictionless horizontal surface. Free Body Diagram (FBD): For mass m_1: Spring force F_s1 = -k_1x_1 from spring k_1. Spring force F_s2 = k_2(x_2 - x_1) from spring k_2. Gravitational force m_1g and normal force N_1. For mass m_2: Spring force F_s2 = -k_2(x_2 - x_1) from spring k_2. Gravitational force m_2g and normal force N_2. Equations of Motion (undamped): m_1x_1 + k_1x_1 - k_2(x_2 - x_1) &= 0 \\ m_2x_2 + k_2(x_2 - x_1) &= 0 where m_1, m_2 are masses, k_1, k_2 are spring stiffnesses, and x_1, x_2 are displacements. 3. Resonance Explanation: Resonance is a phenomenon that occurs when the frequency of an external exciting force matches or is very close to the natural frequency of a system. This leads to a significant increase in the amplitude of vibration, potentially causing large oscillations and structural failure. Sketch: A graph showing the amplitude of vibration on the y-axis versus the excitation frequency on the x-axis. The graph would show a sharp peak in amplitude at a specific frequency, which is the natural frequency (_n) of the system. Free Body Diagram (FBD): No specific FBD is needed for the concept of resonance itself, but it occurs in systems undergoing forced vibration (see point 5). Equation (Amplitude for undamped forced vibration): X = (F_0/k)/(1 - ()_n)^2 where X is the amplitude, F_0 is the amplitude of the exciting force, k is stiffness, is the excitation frequency, and _n is the natural frequency. Resonance occurs when ≈ _n, causing the denominator to approach zero and X to become very large. 4. Damped Free Vibration Explanation: Damped free vibration describes the oscillatory motion of a system that gradually decreases in amplitude over time due to energy dissipation mechanisms (damping), without any external driving force. The system eventually returns to its equilibrium position. Sketch: A graph of displacement versus time, showing a decaying sinusoidal wave. The peaks of the oscillations would progressively get smaller. Free Body Diagram (FBD): A block of mass m. A spring force F_s = -kx opposing displacement x. A damping force F_d = -cx opposing velocity x, where c is the damping coefficient. Gravitational force mg and normal force N. Equation of Motion: mx + cx + kx = 0 where m is mass, c is damping coefficient, k is spring stiffness, x is displacement, and x is velocity. 5. Forced Vibration with Harmonic Excitation Explanation: Forced vibration with harmonic excitation occurs when a system is subjected to a continuous, periodic external force that varies sinusoidally with time. The system will oscillate at the frequency of the applied force, and its amplitude will depend on the force's magnitude, the system's properties, and the proximity of the excitation frequency to the natural frequency. Sketch: A mass-spring-damper system with an external force F(t) = F_0 ( t) applied to the mass. Free Body Diagram (FBD): A block of mass m. A spring force F_s = -kx opposing displacement x. A damping force F_d = -cx opposing velocity x. An external harmonic force F(t) = F_0 ( t) acting on the mass. Gravitational force mg and normal force N. Equation of Motion: mx + cx + kx = F_0 ( t) where m is mass, c is damping coefficient, k is spring stiffness, x is displacement, x is velocity, F_0 is the amplitude of the exciting force, and is the excitation frequency. Send me the next one 📸